Link to the full source article
RSS feed source: National Science Foundation
Origami, the ancient art of paper folding, is taking a futuristic turn with the work of Cynthia Sung at the University of Pennsylvania. Supported by the U.S. National Science Foundation Faculty Early Career Development Program award, “Computational Design for Robust Legged Robots,” Sung’s research blends the precision of engineering with the creativity of art to develop origami-inspired robots. These robots, built from thin, foldable materials, offer a fascinating glimpse into the future of robotics.
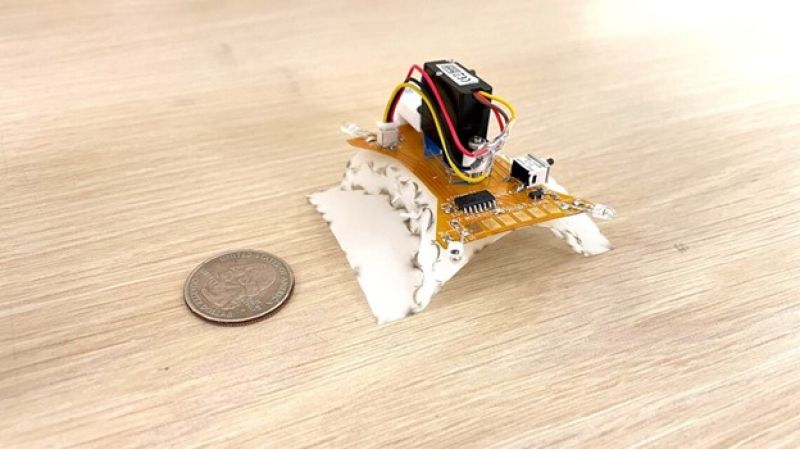
Origami-inspired fabrication and folding approaches can create robots that can transform their shape. For example, the CurveQuad robot recently developed by Sung’s lab is an origami-inspired robot that can fold, unfold, crawl and steer using one motor. Its design is based on curved-crease origami, providing the robot with remarkable agility despite its simplicity — it only has four folds. These robots can directly incorporate electronics, actuation and sensing into their flat body. Such robots could be deployed in swarms for exploration or inspection tasks, showcasing the scalability and cost-effectiveness of this technology.